ZMR250 Build – Part 1 – Parts List
The purpose of this build log is to document the process of building a ZMR250 quadcopter complete with FPV and telemetry. My experience building a previous ZMR250 has been that simple problems like outdated firmware can cause major headaches and heaps of Google searching / forum reading to find the solution. The plan here is to document each step no-matter how seemingly simple it may seem
From fpvmodel.com
ZMR250 V2.1 Mini Quad Frame Kit w/PDB Special Edition - https://youtu.be/fLsN_18vMz8?t=91
Mini DC-DC 12V Voltage Step-down Regulator Module
From Bangood.com
FrSky X4RSB 3/16 Channel Telemetry Receiver
Upgrade NAZE32 SP Racing F3 Flight Control Acro 6 DOF/Deluxe 10 DOF for Multicopter
Eachine 700TVL ET25 5.8G 32CH 25mW 7-24V Super Light Transmitter
MICRO MinimOSD Minim OSD Mini OSD W/ KV Team MOD For Naze32 Flight Controller
From surveilzone.com
New DALprop 2 Pairs 5045BN Bullnose Propellers for Racing
Emax BLHeli Series 12A ESC For Quadcopter RC250 Mini200 QAV250
SunnySky X2204S-16 2300kV Brushless Multirotor Motor
Foxeer XAT600M DC5V-22V 600tvl Sony Super HAD CCD FPV Camera
5.8Ghz Circular-polarized Omni Cloud Spirit Tx Antenna
Betaflight update to Afroflight Naze32
Having recently become aware of Boris B's custom version of Cleanflight known as Betaflight, I decided to update my Acro Naze32 I made this decision after seeing so much positive feedback from others on rcgroups, Facebook and YouTube.
My notes here explain some of the problems I had to overcome before successfully upgrading to Betaflight. Some of the issues are really minor and might seem obvious to others but at times I was almost going to give up thinking I'd just try out Cleanflight 1.10RC3.
The first hurdle came about after somehow I managed to do an incomplete / corrupt firmware update and the Naze32 board become unresponsive (couldn't connect via the Configurator app). The good news was that I read the boot loader is stored in ROM and "the Naze32 board can't be bricked". I read plenty of posts where people explained how to just connect the two physical boot loader pads on the board and re-flash. Shorting pads on any PCB is a risk if you aren't confident which ones to do so just to be clear, owners of the Afroflight Naze32 ver 5 board here's a picture of the boot loader pads.

Afroflight_Naze32_bootloader_pins
I found it easy to solder a lead in place rather than try and hold two pins in place while simultaneously plugging in the micro usb connector and go through the firmware flash. Once the board has booted with the boot loader pads shorted, set a couple of options in Clenflight Configurator;

Configurator set to flash with bootloader pins connected
And flash to ver 1.9.
The next issue I had was trying to use the "Load Local Firmware" button in Configurator. I kept getting error messages to the effect of corrupt or invalid file and "Loaded bytes" would show zero. I hadn't followed the directions properly to download the file from GitHub. I was right clicking on the Naze Betaflight hex file to download it. The problem was I hadn't clicked through to the screen that shows the "RAW" option.
Hex files location (right click download doesn't work here).
Naze32 Hex files right location to download from. From that screen the hex file will download properly.
After finally uploading Betaflight and connecting via Configurator I could configure my board. My next big issue was that the motors would not spin up at all even though I could see the RC input tab and motors output tab showing all the right signs. If I disconnected the LiPo battery and kept the board powered by USB, I found on reconnecting the LiPo would activate the motors but with two problems 1) they wouldn't disarm ever and 2) full throttle on the input stick translated to maybe 50% output on the motors. Eventually I realised that I had BLHeli version 13.xx on the Afro 12A ESCs and Betaflight needs version 14.xx. No big deal unless like me you've soldered the signal pins directly to the board. At this point though I'd invested too much effort to be deterred. After de-soldering all the signal wires and updating BLHeli to the most current version, I'm happy to report a fully functioning board with Betaflight firmware.
I haven't had a chance to actually fly it yet so that feedback will be next.
As a side note, while I had the soldering iron out, I took the time to run a couple of wires to the VBAT pins. This lets me use the audible beeper and the programmable LED strip to warn of low voltage levels. A handy backup in case I forget to connect the LiPo alarm to the battery before each flight.
Orangerx, OpenLRSng, Naze32 – PPM input
The Problem:
I need to activate PPM input to the Naze32 board from the Orangerx UHF running OpenLRSng. PPM input is needed so I can use RC5 pin to control some WS2812 addressable LEDs.
The solution process:
In the Cleanflight configurator, enable RX_PPM. Connect the receiver Port 6 output to the RC input pin 1 of the Naze32 board. The problem is when I do that, and switch on the transmitter (ie the PPM stream is presented to the Naze32 input), the Naze 32 seems to lag horribly. Connecting it to the configurator takes ages for the screen to refresh.
I found disabling Telemetry in the openLRSng options for the orangerx Tx module seemed to fix the problem of the Naze32 board lagging. Now I can use the RC5 pin on the Naze32 board to control the addressable LEDs (WS2812).
The only remaining issue is that appears after arming once, then disarming, I can't re-arm with completely removing power from the Naze32.

Digital Technologies
Despite the importance of digital technologies and security, security breaches, malware attacks and viruses have repeatedly disrupted companies' operations. And the recent case of so-called ransomware demonstrates the vulnerability of a computer system and its data without proper security.
Since modern cloud and "big data" applications are decentralized, they don't rely on some central control center and are therefore much harder to control. And the big data threat includes, among others, the spread of viruses, malware, fraud, etc. and the misuse of company data. If something goes wrong in these environments, the consequences are serious, which is why companies must implement great security systems, like the use of
unified communications and collaborations.
Remote desktop access
Remote desktop access (RDMA) is essentially a different way of establishing a remote connection for telecommuting and collaboration purposes. RDMA can be used to establish connections with remote computers, device or software, effectively connecting anyone who has access to the Internet to any remote system. Look up internet providers near me if you need a fast and reliable connection.

To make use of RDMA, the remote server is deployed on another computer or the network with access to the Internet. But the only communication allowed by a RDMA session is the actual connection to the remote server. Only the use of the RDMA is discussed here. There are other remote access technologies with similar functionality, such as VPN, and DLNA (Direct Long Distance Association).
Using a VPN, it is not possible to connect to a remote RDMA server without authenticating with the login credentials of the RDMA server. As a consequence, if the RDMA server needs to authenticate with the remote RDMA server, there is a risk of unauthorized access. Using DLNA, only the specific device and model of the remote computer must be used to connect with the RDMA server. Backup your data first before doing anything to your network. You can visit the Venyu homepage for more details.
Update OpenLRSng to FW 3.8
Problem: Trying to update the OpenLRSng firmware to version 3.8 failed to due error message "PSP Command Not recognised" after trying to connect the USB to serial adapter to the Tx module
Solution: Flashed the Tx module with the bootloader via the Arduino IDE and USBasp. On doing this I was getting another error message "AVRDUDE: Warning: cannot set SCK period". After trying driver / firmware updates to the USBasp and not being able to solve this error message, i found it didn't really matter after trying a firmware update to 3.8 and it worked anyway!
Aerial Mapping with a GoPro, APM 2.5 & FX-61
The Problem:
Google Map resolution isn't good enough.
The Solution:
Fit a downward facing GoPro camera to Phantom Fx-61 Flying wing, fly circuits with the GoPro taking still images photos every two seconds or so, post process in AgiSoft PhotoScan.
The advantage of creating a map stitched together from still photos as a 3D model means it can be rotated and viewed from any angle. The example below was created from a very quick flight and not even with a pre-programmed flight path. I mostly just flew manual circuits so credit due to the powerful software processing.


This image shows a zoomed in section of this map using Google Earth viewer. The low resolution makes it difficult to make out the details.

The same section but from the custom made map shows a lot more detail.

The Equipment:


“Start message not received within 10 seconds, disconnecting”
The Problem:
Trying to use the openLRSng Configurator app and connect to my OrangeRx Open LRS 433MHz Transmitter 1W just wouldn't connect and keeps reporting the error "Start message not received within 10 seconds, disconnecting"
The Solution:
- Connect your 3.3V FTDI USB to serial adapter to the pins inside the Tx module. At a minimum you need Gnd <-> Gnd, Tx <->Rx, Rx<->Tx connected.
- Make sure the Vcc pin is disconnected.
- Install the Tx module in your transmitter. I'm using a Taranis.
- With the transmitter turned off, advance the throttle to half. This stops power to the Tx module*.
- In the , openLRSng Configurator app enable the auto-connect check box next to "Connect".
- Turn the Tx turned on.
- Plug in the USB to serial FTDI.
- Wait until you see "Serial port successfully opened with ID: #"
- Pull the throttle down so the Tx initialises.
- There should be a couple of beeps and the configurator continues to connect.
Now you can configure your openLRSng Tx and Rx modules all via the Google Chrome Configurator and even use the Spectrum Analyser function.
* I'm not sure if other transmitter brands have the feature where power isn't applied to the Tx module until the throttle is at zero. I found the timing was important between connecting the USB and activating the Tx. With the Taranis it seemed to be much easier by having the Transmitter in the on state but with throttle up, as soon as the "connecting" message appeared, pull the throttle and it connected.
I did manage to connect without using the throttle up trick but only once and I couldn't get it to do it again. I read a post on rcgroups where a guy said it took him 20 tries before it would connect.
avrdude: stk500():not in sync: resp=0x00
The Problem:
Trying to flash the Hobbyking OrangeRX Open LRS 433MHz Transmitter 1W ( JR Compatible) with openLRS produced the error "avrdude: stk500():not in sync: resp=0x00" in the Arduino IDE.
The solution:
Buy a 3.3V USBAsp board and following the guide here, flash the bootloader to the board. Once the bootloader was installed, the openLRS firmware uploaded without any errors.
Making an NDVI Camera
Following the guide here;
http://flightriot.com/make-an-infrared-camera-for-aerial-mapping-remote-sensing/
http://publiclab.org/wiki/ndvi
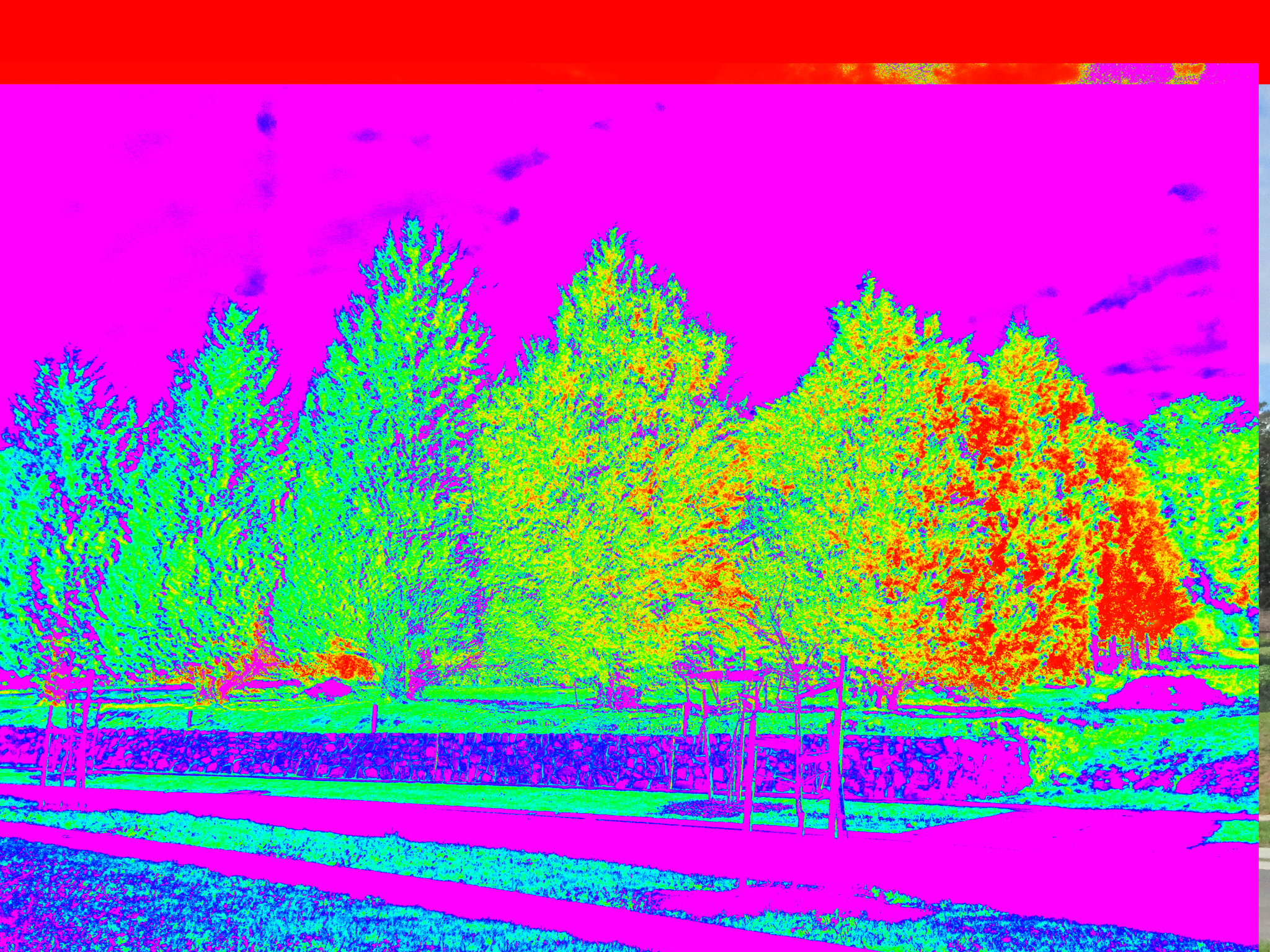
I'm making a camera capable of taking near-infrared photos. The theory being that with some image processing, a photo taken with an NDVI camera can show where plants / vegetation is growing well compared to where it's not growing so well.
The hardest part involves taking a camera apart, removing the infrared filter and putting it all back together in a working state. A couple of cheapy cameras off eBay help with the practice. I destroyed the first camera but go the second going ok. Here's a photo of the camera in pieces and the image sensor.


The photos below show "normal", "near infrared" and "NDVI" versions of the same photo;





{kind=link}
{kind=link}



Character Set Update – MinimOSD
The problem:
The on screen display (OSD) characters from the Hobbyking Minim OSD v1.1 appear garbled.

minim OSD ready for character set update