ZMR250 v2 Build – Part 8 – FC Power Connection
Initially I hooked up power to the Flight Controller from the 'BEC' and 'GND' pins next to the FC but this didn't work..... the reason..... the BEC pin is designed to take 5V from the ESC BEC which of course I don't have because I'm using the LittleBee 20A ESCs which don't have a BEC.
The alternative is to use the 5V regulator built into the PDB. Oscar Liang's web page has some excellent diagrams showing the layout and connections of the ZMR250 v2 PDB.
ZMR250 Build – Part 7 – Buzzer Connection
The early versions of the Banggood SP Racing Flight Controller have an issue where the buzzer connections don't work. To get around it is an easy fix and just requires soldering a couple of wires from the bottom side of the FC to the buzzer connections.
ZMR250 Build – Part 5 – EMAX 12A ESC Update
In this video I look at updating the EMAX 12A ESCs with a direct connection to BLHeli via an Arduino Uno (as opposed to going via the flight control board). Initial reading of the supported SiLabs ESCs documents indicated it wasn't going to be straightforward. After some Googling I found the video below which shows step by step instructions how to do this.
The alternative would be just to buy one of the EMAX $10 programming cards which I guess is simple enough but then I'll never be able to do BLHeli firmware updates plus I like being able to use the BLHeli to check and set the ESC parameters.
After going through the process of soldering on a wire to each of the four ESCs and updating to the latest BLHeli, I found these particular ESCs don't support damped (damping?) light / active braking which is a bit of a bummer so I ordered four Little Bee ESCs instead. It would be interesting to compare between the two types of ESCs when it comes to flying but I'm not sure I'm up for the hassle of swapping out the ESCs.
Industrial Producers
Many industrial producers think primarily in terms of geographic coverage before considering distinct market or customer segments. But market segments and customer segments must be identified in order to develop an accurate product, service and pricing framework. And it is this step that many industrial producers fail to take.

Industry-Specific Business Model
Industrial producers like those that manufacture industrial rubber products often define their own business model, the way the product is delivered, marketed and priced, and the way it is integrated into the larger industry, rather than aligning with the prevailing business models of their competitors.
Industry-specific business models result in different financial incentives for business owners, and, in turn, different business models and revenue expectations. There are four major types of industry-specific business models: "non-distributed," "distributed" and "remote."
Industry-specific business model "non-distributed" refers to an industry that is controlled by the small number of large, capitalized players who are the gatekeepers of all of the market access, prices and distribution.
Industry-specific business model "distributed" refers to an industry where the large players control the bulk of the market. "Remote" refers to the industry where there are many small players, but most of the price discovery and distribution are done by large, centralized players.
ZMR250 Build – Part 2 – Power & ESC Check
In this video I hook up power to the fpvmodel PDB and to the EMAX 12A ESC. I'm trying to decide whether to solder the Sunnysky motors directly to the ESC or to the ESC leads. Removing the heatshrink from the ESC shows what looked like dodgy solder job touching the pins of the ICs. I wondered if they were going to work at all. After hooking up power and successfully testing them, I decided to use the ESC leads to connect to the motors for two reasons;
- Unlike other ESCs that have the three points at the end of the ESC to connect to the motor wires, these EMAX 12A ESCs have them along the middle of the board which means the wires would be staggered (different lengths).
- The connections are inbetween ICs and some of them make contact with the legs of the ICs. I don't want to break the connections with a messy soldering job.
ZMR250 Build – Part 4 – FC Firmware Flash
In this video I hook up the SP F3 Flight Controller to update the firmware via the Cleanflight Configurator app. Even though I've done this a heap of times I still manage to make mistakes doing the firmware flash. Some of the mistakes include;
- Wrong settings in the app.
- I'm so used to flashing my Naze32 rev5/6 boards, I uploaded the wrong Betaflight firmware (now I'm using the SP F3 FC).
- Leaving the "flash on connect" setting active in the configurator without realising it and interrupting a firmware update before it finished.
I remember reading somewhere that "you can't brick these boards" because the bootloader is stored in ROM. Just short the boot pins and flash again. Lucky for me the boards are resilient in this way as I've had to use the bootloader pins a number of times.
I never did get the 4way BLHeli firmware update to work via the FC board so in the end I gave up on that option and looked at updating the ESCs with a direct connection to the board. More on that in the next video.
ZMR250 Build – Part 3 – Motor & ESC Test
In this video I let Grace take the controls of the motor and test it mounted to the 4mm arm. The first thing I noticed was the motor stuttered at low throttle. Looking closely at the bottom of the motor mount I noticed the circlip on the motor shaft was stuck against the side of the hole cut through the arm for the motor shaft. For this test I simply centred the motor so the circlip spins freely however I think the better long term solution is to enlarge the hole.
Gracie gets a chance to check out the running lights on the PDB and quite likes them.
ZMR250 Build – Part 1 – Parts List
The purpose of this build log is to document the process of building a ZMR250 quadcopter complete with FPV and telemetry. My experience building a previous ZMR250 has been that simple problems like outdated firmware can cause major headaches and heaps of Google searching / forum reading to find the solution. The plan here is to document each step no-matter how seemingly simple it may seem
From fpvmodel.com
ZMR250 V2.1 Mini Quad Frame Kit w/PDB Special Edition - https://youtu.be/fLsN_18vMz8?t=91
Mini DC-DC 12V Voltage Step-down Regulator Module
From Bangood.com
FrSky X4RSB 3/16 Channel Telemetry Receiver
Upgrade NAZE32 SP Racing F3 Flight Control Acro 6 DOF/Deluxe 10 DOF for Multicopter
Eachine 700TVL ET25 5.8G 32CH 25mW 7-24V Super Light Transmitter
MICRO MinimOSD Minim OSD Mini OSD W/ KV Team MOD For Naze32 Flight Controller
From surveilzone.com
New DALprop 2 Pairs 5045BN Bullnose Propellers for Racing
Emax BLHeli Series 12A ESC For Quadcopter RC250 Mini200 QAV250
SunnySky X2204S-16 2300kV Brushless Multirotor Motor
Foxeer XAT600M DC5V-22V 600tvl Sony Super HAD CCD FPV Camera
5.8Ghz Circular-polarized Omni Cloud Spirit Tx Antenna
Digital Technologies
Despite the importance of digital technologies and security, security breaches, malware attacks and viruses have repeatedly disrupted companies' operations. And the recent case of so-called ransomware demonstrates the vulnerability of a computer system and its data without proper security.
Since modern cloud and "big data" applications are decentralized, they don't rely on some central control center and are therefore much harder to control. And the big data threat includes, among others, the spread of viruses, malware, fraud, etc. and the misuse of company data. If something goes wrong in these environments, the consequences are serious, which is why companies must implement great security systems, like the use of
unified communications and collaborations.
Remote desktop access
Remote desktop access (RDMA) is essentially a different way of establishing a remote connection for telecommuting and collaboration purposes. RDMA can be used to establish connections with remote computers, device or software, effectively connecting anyone who has access to the Internet to any remote system. Look up internet providers near me if you need a fast and reliable connection.

To make use of RDMA, the remote server is deployed on another computer or the network with access to the Internet. But the only communication allowed by a RDMA session is the actual connection to the remote server. Only the use of the RDMA is discussed here. There are other remote access technologies with similar functionality, such as VPN, and DLNA (Direct Long Distance Association).
Using a VPN, it is not possible to connect to a remote RDMA server without authenticating with the login credentials of the RDMA server. As a consequence, if the RDMA server needs to authenticate with the remote RDMA server, there is a risk of unauthorized access. Using DLNA, only the specific device and model of the remote computer must be used to connect with the RDMA server. Backup your data first before doing anything to your network. You can visit the Venyu homepage for more details.
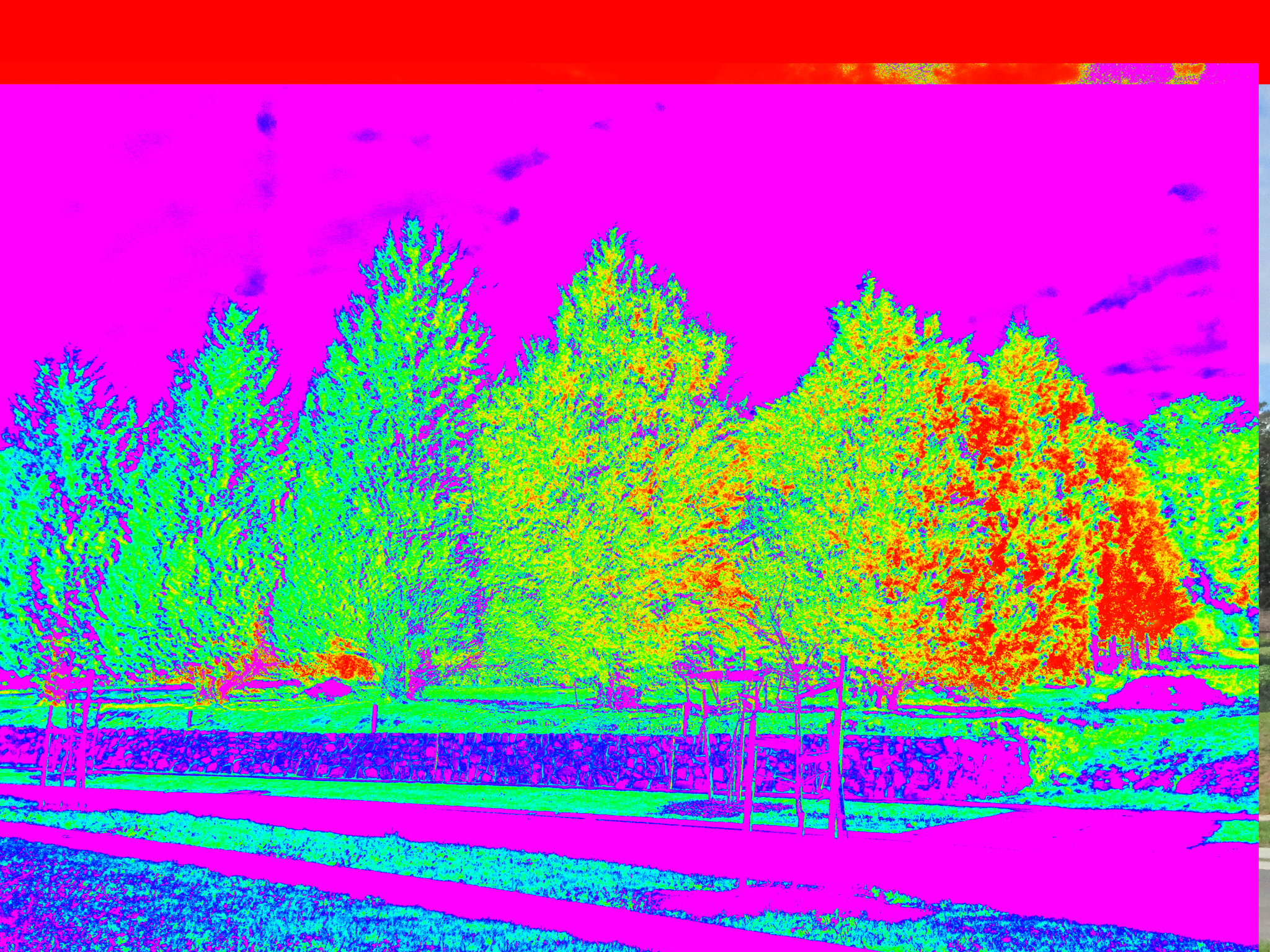
Making an NDVI Camera
Following the guide here;
http://flightriot.com/make-an-infrared-camera-for-aerial-mapping-remote-sensing/
http://publiclab.org/wiki/ndvi
I'm making a camera capable of taking near-infrared photos. The theory being that with some image processing, a photo taken with an NDVI camera can show where plants / vegetation is growing well compared to where it's not growing so well.
The hardest part involves taking a camera apart, removing the infrared filter and putting it all back together in a working state. A couple of cheapy cameras off eBay help with the practice. I destroyed the first camera but go the second going ok. Here's a photo of the camera in pieces and the image sensor.


The photos below show "normal", "near infrared" and "NDVI" versions of the same photo;





{kind=link}
{kind=link}


